Auswirkungen einer dynamischen Gewichtsverlagerung – Teil 1
Die Art und Weise, wie ein Fahrzeug die Kraft auf die Straße überträgt, beeinflusst maßgeblich das Fahrverhalten. Hierbei spielt die Position des Schwerpunkts eine wichtige Rolle, da die Radlasten und das Eigenlenkverhalten direkt davon abhängen. Im Rahmen meines Masterstudiums haben wir als dreiköpfiges Team eine Simulation entwickelt, um zu prüfen, ob sich diese Idee auf die Rundenzeiten eines Sportwagens auswirkt.
Die Idee
In diesem Beitrag beschreibe ich die Auswirkungen einer aktiven Gewichtsverlagerung auf das Fahrverhalten. Dabei werde ich typische Kenngrößen aus der Fahrdynamik heranziehen.
Zunächst analysieren wir den Einfluss einer konstanten Verschiebung der Schwerpunktlage unter verschiedenen Fahrsituationen mithilfe eines Referenzfahrzeugs. Die Ergebnisse dienen als Grundlage für die strategische Festlegung der dynamischen Gewichtsverlagerung. Ein geeignetes Manöver wird das Potenzial der aktiven Verlagerung demonstrieren.
Um dieses Konzept umzusetzen, wird die Software CarMaker for Simulink zur Entwicklung des Reglers verwendet. Der Regler verschiebt gezielt eine Zusatzmasse unter Berücksichtigung der jeweiligen Fahrsituation. Da es sich um ein Gedankenexperiment handelt, ist die technische Machbarkeit vorerst nicht von Bedeutung.
Grundlage
Die Bewegungen eines Fahrzeugs werden durch die Fahrdynamik beschrieben. Diese kann in drei translatorische Freiheitsgrade unterteilt werden, nämlich Längs‑, Quer‑ und Vertikalbewegung. Abbildung 1: Unterteilung der Fahrdynamik nach Bernd Heißing – Fahrwerkhandbuch: Grundlagen, Fahrdynamik, Komponenten, Systeme, Mechatronik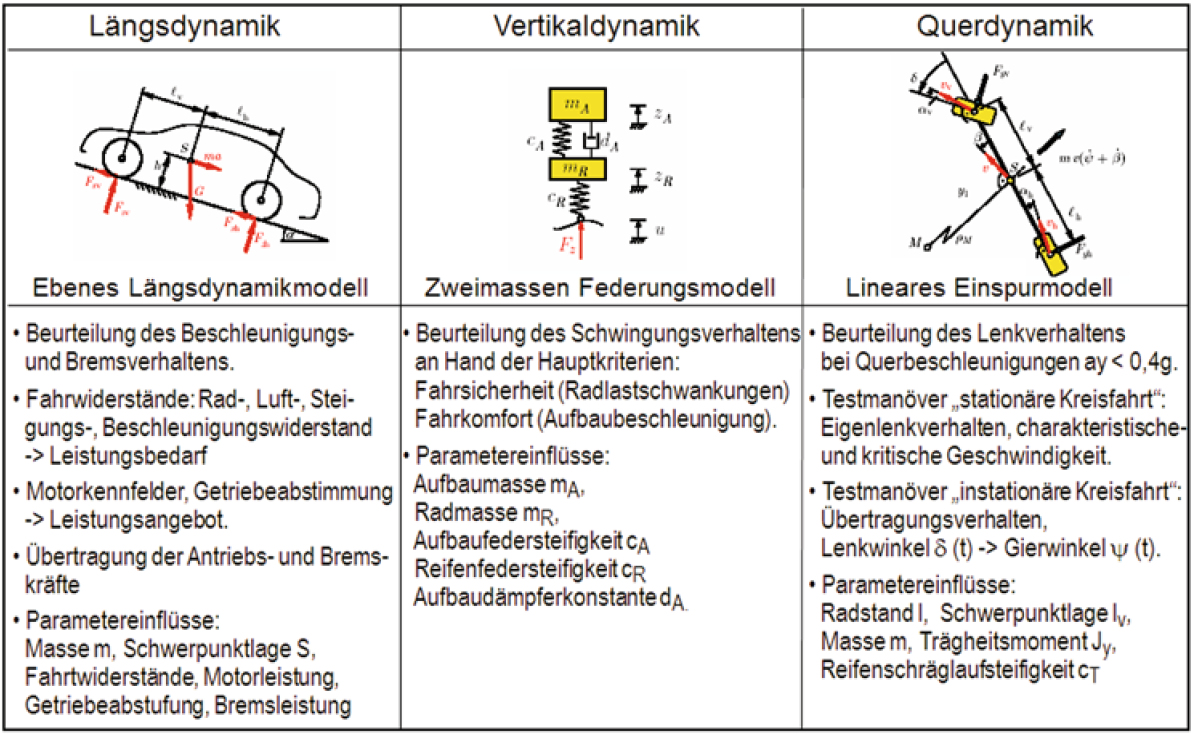
Auf die Herleitung einzelner fahrdynamischer Kenngrößen möchte ich hier nicht eingehen; wer daran Interesse hat, den verweise ich auf die umfangreiche Literatur, die es zu diesem Thema sowohl in deutscher als auch in englischer Sprache gibt.1
Voruntersuchung
Vor der Entwicklung des Reglers wurde eine Voruntersuchung durchgeführt. Ziel dieser Untersuchung ist es, das Fahrverhalten bei gängigen Fahrmanövern zu beurteilen und das Fahrermodell zu validieren. Dazu werden gemäß Tabelle 3 einzelne Versuchsfahrten durchgeführt, bei denen eine Zusatzmasse entsprechend den Koordinaten aus Tabelle 2 im Fahrzeug verschoben wird. Die Voruntersuchung zielt darauf ab, den Einfluss der Zusatzmasse auf das Fahrverhalten bei Geradeausfahrt und Kurvenfahrten zu untersuchen. Die gewonnenen Erkenntnisse dienen als Grundlage für die Erstellung der Kennlinie des Reglers und ermöglichen erste Rückschlüsse auf die Größenordnung des Einflusses, um den dafür erforderlichen Aufwand zu rechtfertigen.
Zusatzmasse und Fahrzeugmodell
Die Tabelle 1 enthält die geometrischen und physikalischen Eigenschaften der Zusatzmasse. Um eine hohe Masse bei kleinen Abmessungen zu erreichen, wurde Blei aufgrund seiner hohen Dichte als Material gewählt.
| Länge [m] | Breite [m] | Höhe [m] | Masse [kg] | Jxx [kg·m²] | Jyy [kg·m²] | Jzz [kg·m²] | Dichte [kg/m³] |
|---|---|---|---|---|---|---|---|
| 0.529 | 0.51 | 0.08 | 244,8 | 5,44 | 5,84 | 11,01 | 11342 |
Im Bild ist das Fahrzeug für die Simulation in CarMaker qualitativ dargestellt. Zur Nachbildung wurde der Audi TT mit Schaltgetriebe gewählt, da dies ein Standard-Demofahrzeug von CarMaker ist. Da für die Untersuchung nur vorgefertigte Beispielfahrzeuge aus CarMaker zur Verfügung stehen, wurde dieser spezielle Wagen ausgewählt, um ein Fahrzeug aus der DTM nachzubilden. Abbildung 2: Ballast und Bewegungsraum (Quelle: Blueprint Audi TT – blueprintbox.com)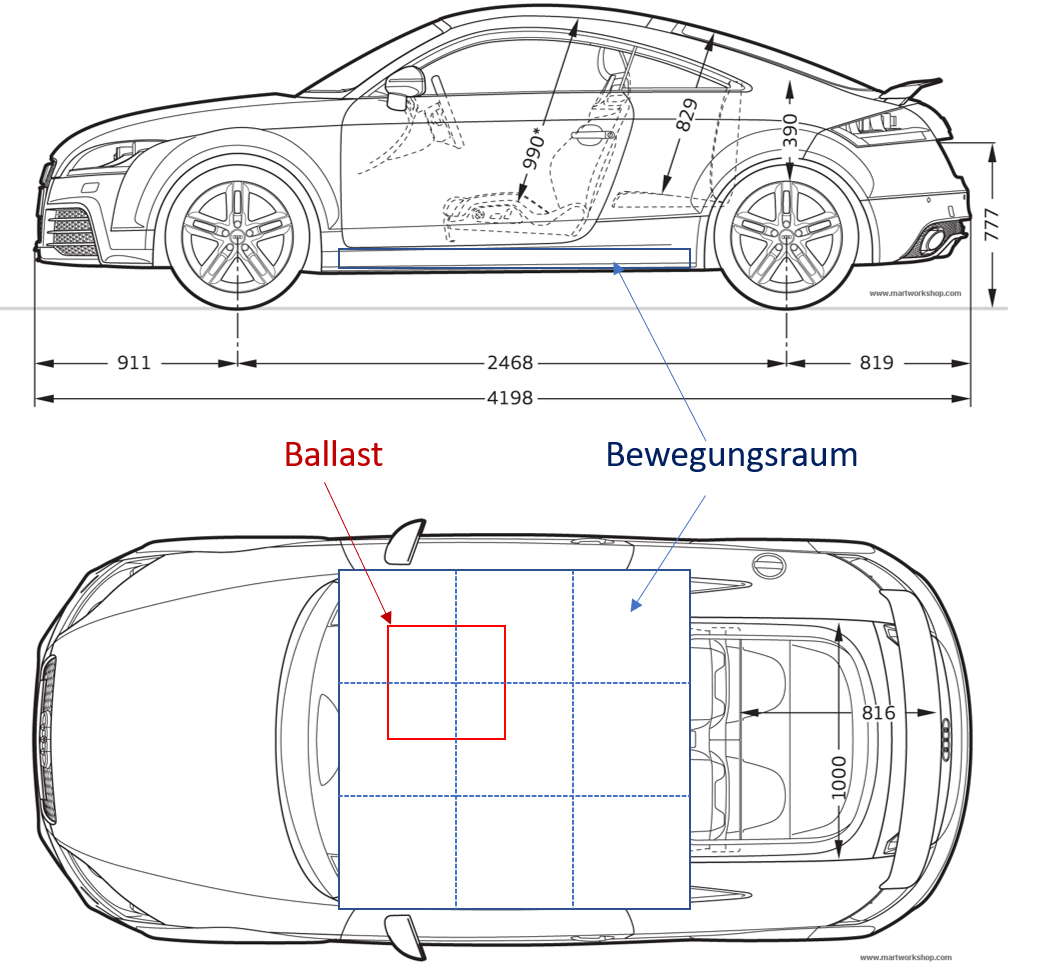
Der Ballastraum ist ebenfalls qualitativ dargestellt und befindet sich zwischen dem Fußraum und dem Fahrzeugunterboden. Seine Abmessungen sind aus den Abmessungen der Zusatzmasse abgeleitet. Die Länge des Ballastraums (lBr) berechnet sich aus lBr = l3 × l, und die Breite des Ballastraums (bBr) beträgt 3 × b. Der Ballastraum ist in neun Abschnitte unterteilt, deren Positionen in der folgenden Tabelle aufgeführt sind. Das Ausschwingen der Masse wird in diesem Fall nicht beachtet, weshalb ein Pufferraum dafür nicht vorgesehen ist.
Tabelle 2
| Bezeichnung | x [m] | y [m] | z [m] |
|---|---|---|---|
| Referenz | 2.052 | 0 | 0.547 |
| vorne links (vl) | 2.572 | 0.508 | 0.221 |
| vorne Mitte (vm) | 2.572 | 0 | 0.221 |
| vorne rechts (vr) | 2.572 | −0.508 | 0.221 |
| Mitte links (ml) | 2.046 | 0.508 | 0.221 |
| Mitte (M) | 2.046 | 0 | 0.221 |
| Mitte rechts (mr) | 2.046 | −0.508 | 0.221 |
| hinten links (hl) | 1.522 | 0.508 | 0.221 |
| hinten Mitte (hm) | 1.522 | 0 | 0.221 |
| hinten rechts (hr) | 1.522 | −0.508 | 0.221 |
Tabelle 3
| Versuch | Streckenabschnitt | Manöver | Variation | Pos der Masse |
|---|---|---|---|---|
| V1 | Geradeausfahrt | Beschleunigung | a = 50 %, a = 100 % | VR, VR, M, MR, HM, HR |
| V2 | Geradeausfahrt | Verzögerung | a = –50 %, a = –100 % | VR, VR, M, MR, HM, HR |
| V3 | stationäre Kreisfahrt | konstante Geschwindigkeit | 40 km/h, 30 km/h; r = 20 m, r = 42 m | VL, VM, VR, ML, M, MR, HR, HM, HL |
| V4 | Kreisfahrt | dynamische Fahrt | v = permanente Erhöhung | VL, VM, VR, ML, M, MR, HR, HM, HL |
Ergebnisse
Die Ergebnisse der Versuchsfahrt zeigten, dass die Position der Zusatzmasse keinen signifikanten Einfluss auf das Beschleunigungsverhalten hatte, wie aus Abbildung 3 ersichtlich ist. Abbildung 4 zeigte, dass das Fahrzeug aufgrund des fehlenden Lenkwinkels an den Rädern geradeaus fahren sollte. Dennoch wurde nach dem Start eine Querbeschleunigung sowie eine daraus resultierende Gierrate beobachtet, wie aus Abbildung 5 und 6 hervorgeht. Dieses Verhalten trat auf, wenn die Zusatzmasse auf der rechten Seite des Fahrzeugs positioniert wurde – dies führte zu einer Schwerpunktverschiebung und einem Giermoment zur entsprechenden Seite. Da der Fahrer nach den Einstellungen des Manövers keinen Einfluss auf die Lenkung haben sollte, wurde das Fahrzeug nach dem Start nach rechts gezogen. Dies geschah jedoch nur bei Manövern, bei denen eine Querbeschleunigung in die entsprechende Richtung entstand. Bei Positionierung der Zusatzmasse auf der linken Seite verhielt sich das Fahrzeug analog: Es wurde aufgrund des auftretenden Giermoments nach links gezogen. Bei den Standardeinstellungen kompensierte der Fahrer diesen Einfluss, und das Fahrzeug behielt seinen Kurs.
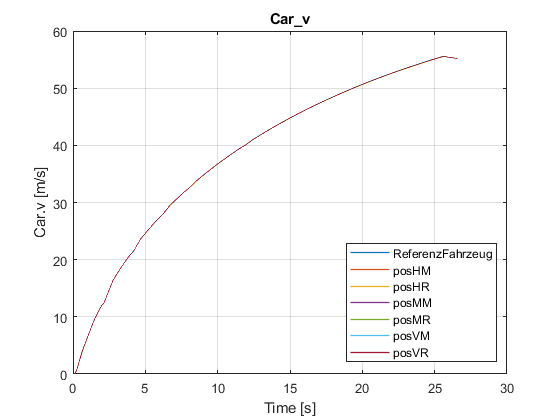
Abbildung 3: Verlauf der Geschwindigkeit
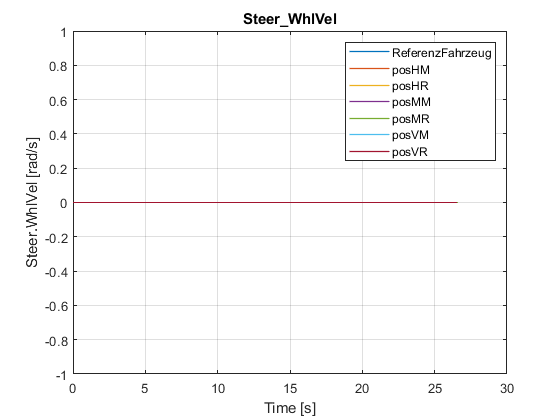
Abbildung 4: Lenkwinkel
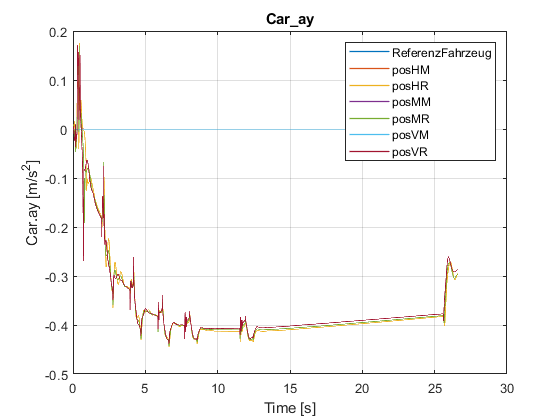
Abbildung 5: Querbeschleunigung
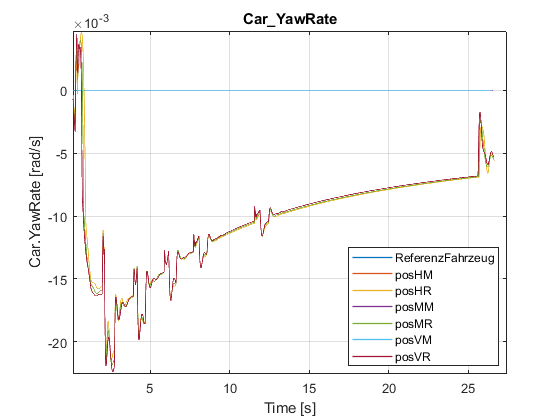
Abbildung 6: Gierrate
Versuchsfahrten: nicht stationär
Die Ergebnisse der nicht stationären Versuchsfahrten sind für die Reglerentwicklung besonders relevant. Gemäß der Fahrdynamik federt die kurveninnere Seite aus, während die kurvenäußere Seite einfedert. Daher führt eine Positionierung der Zusatzmasse auf der Kurveninnenseite zu einem verbesserten Kurvenverhalten und mehr Stabilität während der Kurvenfahrt. Genau dieses Verhalten wird in Abbildung 7 und 8 dargestellt. Das Fahrmanöver wurde so konfiguriert, dass die Simulation endet, sobald das Fahrzeug ausbricht und die Fahrbahn verlässt. Aus den Ergebnissen ist ersichtlich, dass das Fahrzeug eine höhere Querbeschleunigung erreicht, wenn die Zusatzmasse auf der linken Seite positioniert ist (in diesem Fall die Kurveninnenseite). Auf der Kurvenaußenseite hingegen erreicht das Fahrzeug die geringste Querbeschleunigung; die Simulation bricht hier auch am schnellsten ab. Ähnlich verhält es sich mit der Fahrzeuggeschwindigkeit. Zu beachten ist jedoch, dass die geringe Abweichung zwischen maximalem und minimalem Wert nicht vernachlässigt werden sollte.
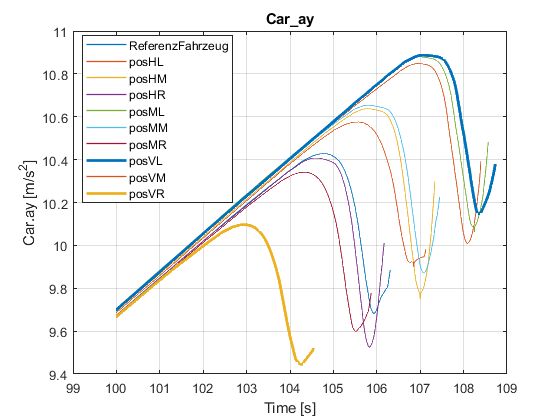
Abbildung 7: Querbeschleunigung in der Kreisfahrt
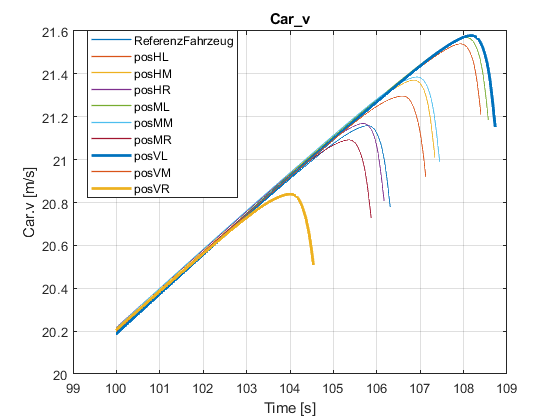
Abbildung 8: Geschwindigkeit in der Kreisfahrt
Fazit der Voruntersuchung
Für die Reglerentwicklung lassen sich folgende Schlüsse ziehen:
- Eine Verschiebung der Zusatzmasse in Längsrichtung beeinflusst das Fahrverhalten nur geringfügig.
- Auftretende Giermomente werden vom Fahrer kompensiert.
- Im linearen Bereich verhält sich das Fahrzeug entsprechend den Erwartungen der technischen Mechanik.
- Eine Regelung in Querrichtung könnte im nicht linearen Bereich sinnvoll sein.