Gedankenexperiment - Auswirkungen einer dynamischen Gewichtsverlagerung - Teil 2
Die Art und Weise, wie ein Fahrzeug die Kraft auf die Straße überträgt, beeinflusst maßgeblich das Fahrverhalten. Hierbei spielt die Position des Schwerpunkts eine wichtige Rolle, da sich die Radlasten und das Eigenlenkverhalten direkt davon abhängig machen. Im Rahmen meines Masterstudiums haben wir als dreiköpfiges Team eine Simulation entwickelt, um zu prüfen, ob sich diese Idee auf die Rundenzeiten eines Sportwagens auswirkt.
Reglerentwurf
Die Simulation der Ballastverschiebung wird mittels CarMaker for Simulink durchgeführt. Hierfür wird ein Simulink-Modell erstellt und in das bestehende CarMaker-Modell integriert. Dabei werden die Positionswerte von Load_0 abgegriffen und überschrieben. Die Position des Ballastes wird in einem Regelkreis geregelt, wobei die Steuergrößen des Fahrers, wie beispielsweise die Gas-, Brems- und Kupplungspedalstellung sowie der Lenkwinkel, als Eingangsgrößen für die Bestimmung der Soll-Positionen dienen. Die Änderungen im CarMaker-Modell werden in den folgenden Abbildungen veranschaulicht. Zur besseren Übersichtlichkeit sind die modellierten Blöcke und Signale in einem blauen Bereich hervorgehoben. Die Steuerungssignale werden aus dem Block DrivMan abgegriffen und zu einem Bus zusammengefasst, welcher über die Route IPGVehicle - CarAndTrailer - Forces in den Block VehicleForces führt. Dort werden die Signale wieder in die vier Einzelsignale aufgeteilt, die in das entwickelte Ballastregelmodell führen.
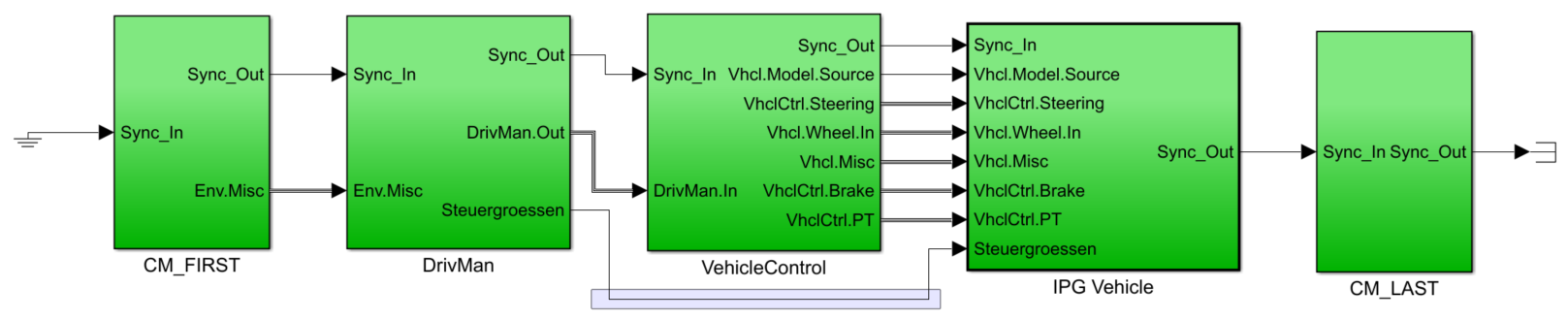 Abbildung 1: CarMaker Modell Aufbau in Simulink
Abbildung 1: CarMaker Modell Aufbau in Simulink
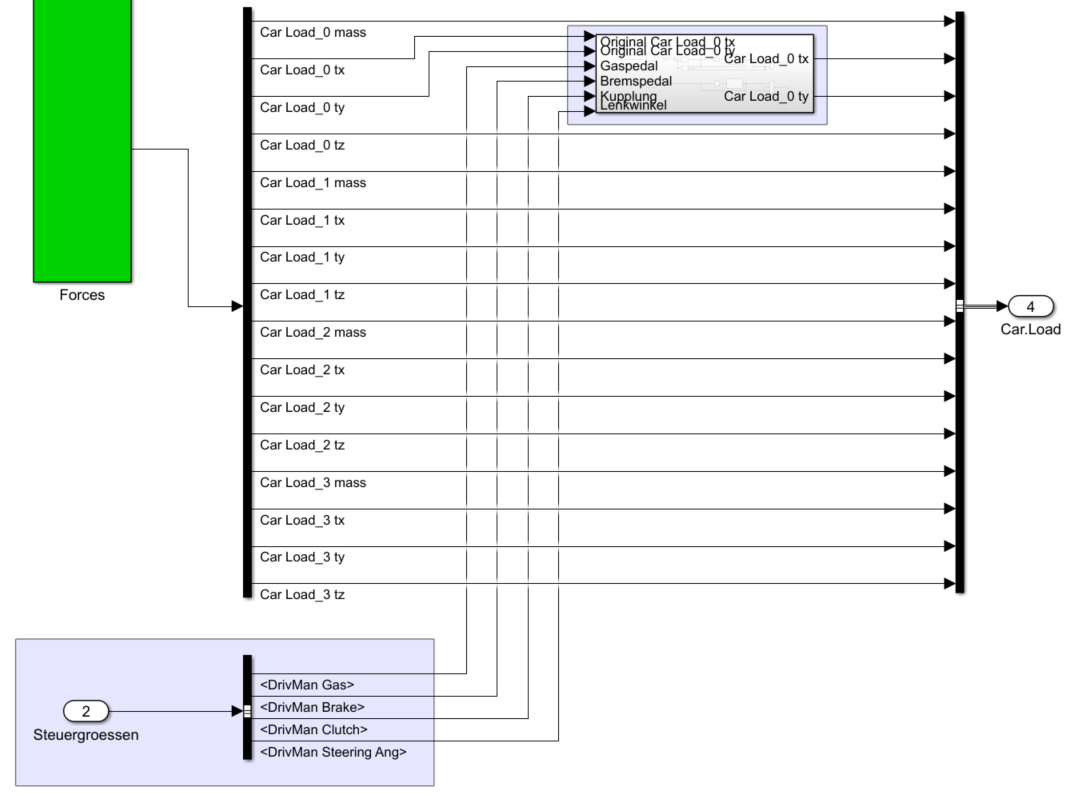 Abbildung 2: Schnittstelle für Regler in Simulink
Abbildung 2: Schnittstelle für Regler in Simulink
Reglermodell
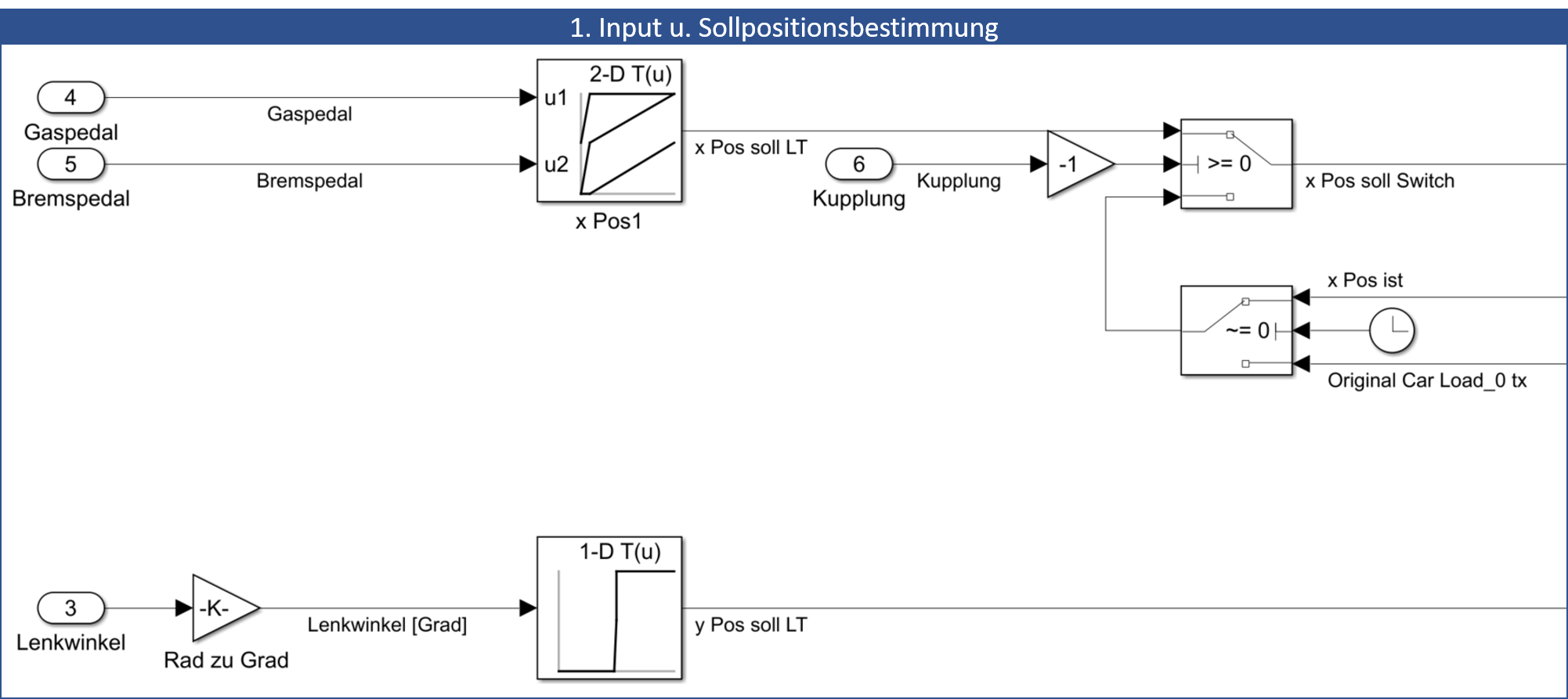
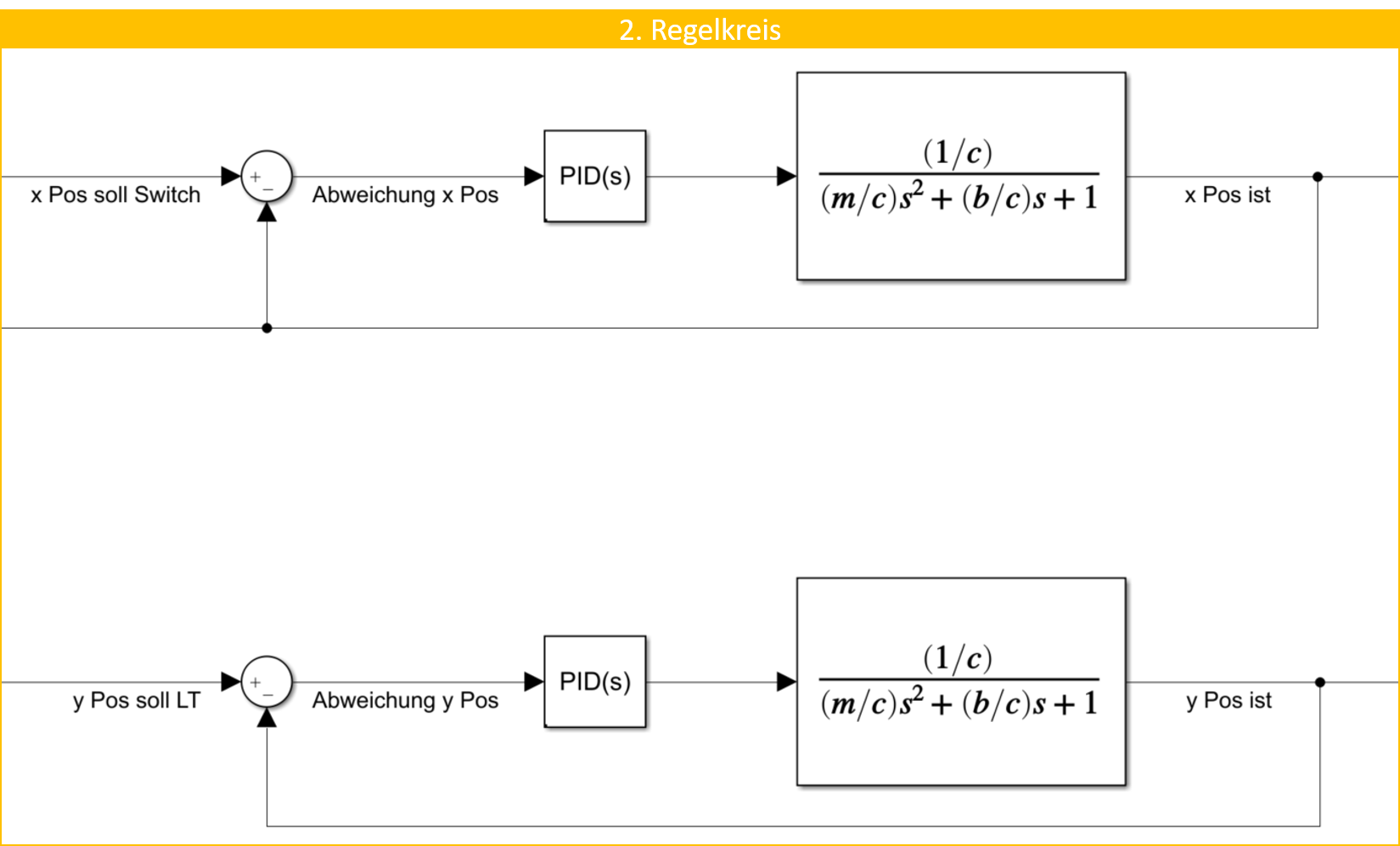
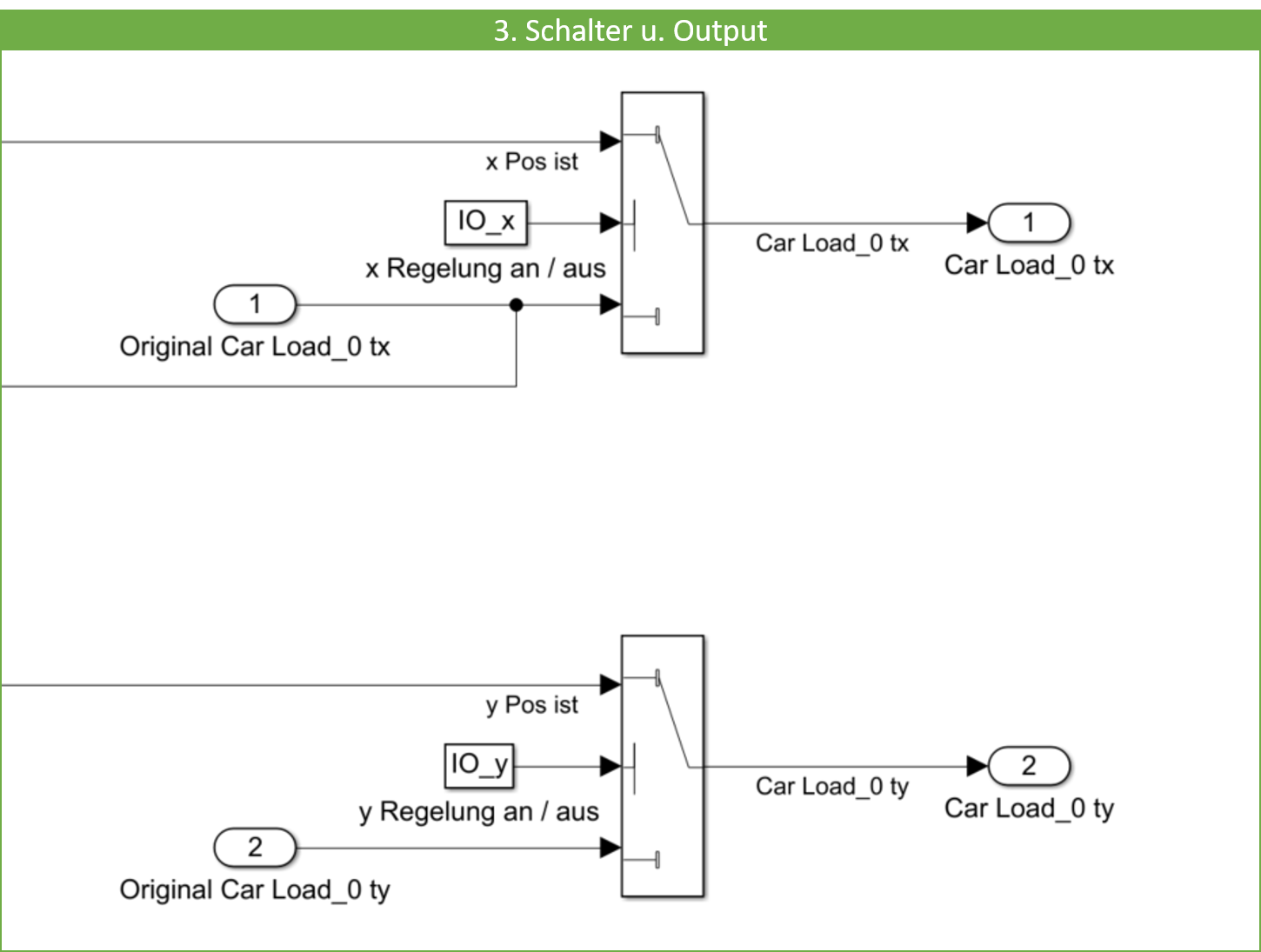
Das Modell enthält für die beiden Bewegungsrichtungen in der Ebene einen Pfad. So ist der obere Pfad für die Positionsregelung in Längsrichtung (x-Pos) verantwortlich und der untere Pfad für die Positionsregelung in Querrichtung (y-Pos). Die Pfade können wiederum in drei Abschnitte unterteilt werden. Der erste Abschnitt beinhaltet die Inputsignale und die Bestimmung der Sollpositionen anhand von Look-Up-Tabellen. Der zweite Abschnitt besteht aus einem Regelkreis mit Regler und Strecke und der dritte Abschnitt umfasst zwei Schalter, mit Hilfe derer die Regelung des Ballastes in beide Richtungen separat aus- oder eingeschaltet werden kann sowie die Outputsignale.
 Abbildung 3: Reglermodell
Abbildung 3: Reglermodell
Regelstrecke:
Entscheidend für die Modellierung der technischen Einmassenschwingsysteme war die Wahl eines geeigneten Verzögerungsglieds zweiter Ordnung, das auch als PT2-Glied bezeichnet wird. Die Übertragungsfunktion :
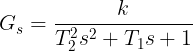
umgeformt auf unser Simulinkmodell:
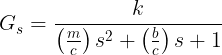
mit dem Parametern:
c:1.2
b:0.8
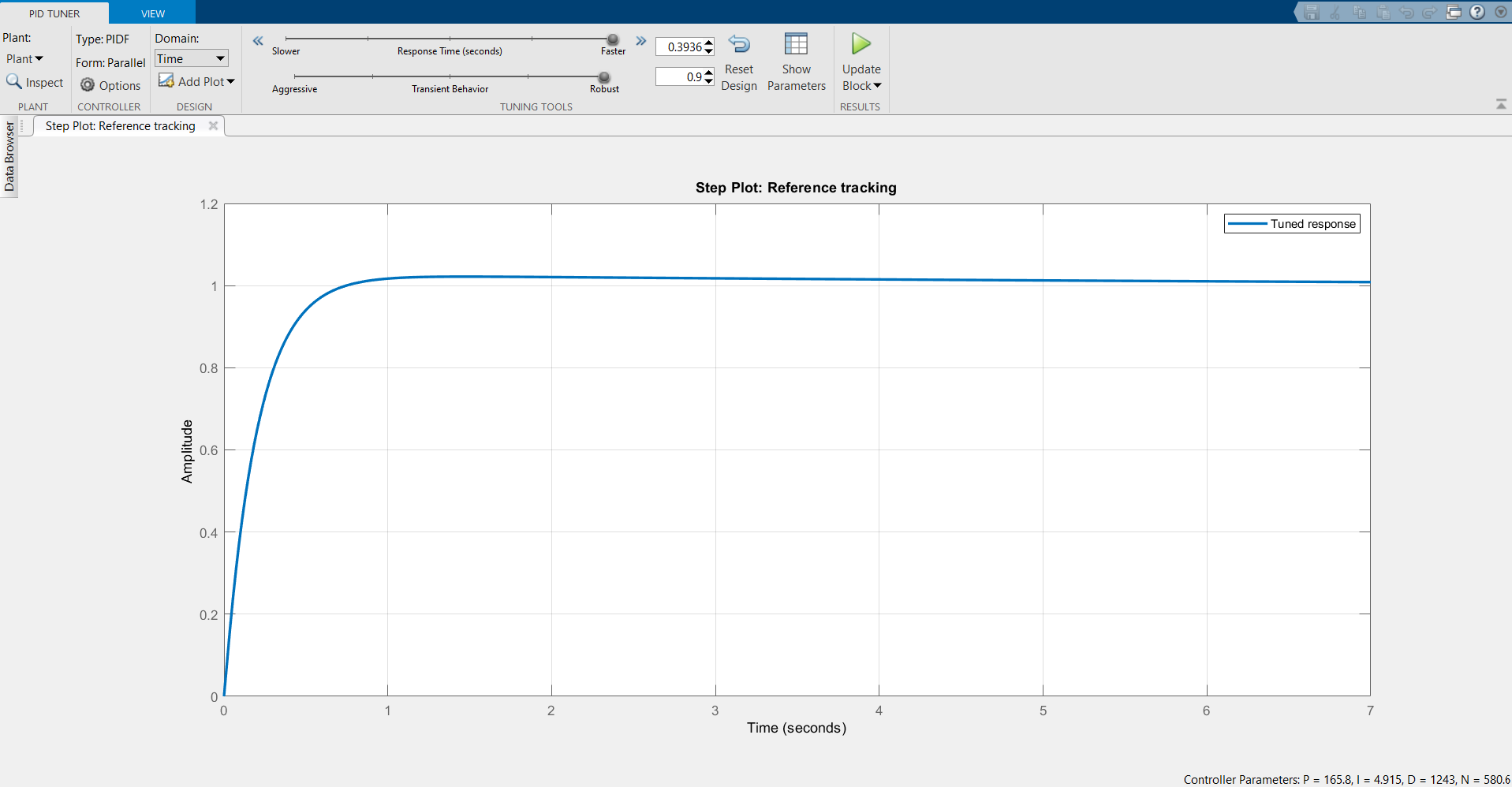
Übertragungsfunktion des PID-Reglers:

Regler:
Zur Bestimmung der optimalen Parameter für den PID-Regler wurde eine Regelkreisoptimierung durchgeführt. Hierfür wurde der Regler-Tuner in Simulink genutzt, welcher eine automatische Parameterbestimmung ermöglicht. Dabei können die Regelgeschwindigkeit und Robustheit mithilfe von zwei Schiebereglern eingestellt werden. Die Anforderung an den Regelkreis bestand darin, dass der Ballast innerhalb einer Sekunde von der Mittellage in den äußersten Bereich, etwa 0,5 m, verschoben werden kann, ohne dass ein großer Überschwinger auftritt. Die Schieberegler wurden auf die höchste Regelgeschwindigkeit und maximale Robustheit eingestellt.
Vergleich der Rundenzeiten:
Aufgrund der Tatsache, dass der entworfene Regler eine Kombination aus Längs- und Querregelung darstellt, wurden vier Simulationen durchgeführt, von denen drei mit dem Regler und eine ohne den Regler für jeweils zehn Runden durchgeführt wurden. Diese Simulationen wurden durchgeführt, um die Ergebnisse aus der Voruntersuchung zu bestätigen.
Teststrecke:
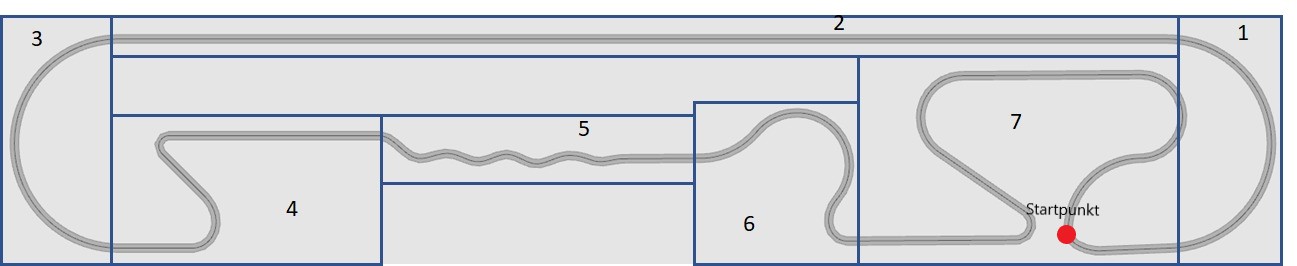 Abbildung 4: Teststrecke in CarMaker
Abbildung 4: Teststrecke in CarMaker
Die Teststrecke ist in Abbildung 4 dargestellt und zur besseren Übersicht in sieben Abschnitte unterteilt. Der Startpunkt wird durch einen roten Punkt auf der Karte markiert. Eine Runde auf der Strecke hat eine Länge von etwa 3,5 km. Im ersten Abschnitt (1) durchfährt das Fahrzeug eine relativ lange Linkskurve mit einem Radius von 100 m. Anschließend folgt im zweiten Abschnitt (2) ein 1 km langer Beschleunigungsbereich, in dem das Fahrzeug eine hohe Geschwindigkeit aufbauen kann, um im dritten Abschnitt erneut die Linkskurve mit dem gleichen Radius zu durchfahren. Im vierten Abschnitt (4) wird das Fahrzeug mit relativ hoher Geschwindigkeit in eine Schikane geleitet, die aus einer Linkskurve mit einem Radius von 20 m und einer scharfen Rechtskurve mit einem Radius von 10 m besteht. Im fünften Abschnitt (5) folgt ein Slalom, gefolgt von einer langen Rechtskurve mit einem Radius von 50 m im sechsten Abschnitt (6). Im siebten Abschnitt (7) befinden sich zwei Linkskurven mit Radien von 15 m und 70 m, ein kleiner Beschleunigungsabschnitt sowie zwei Rechtskurven mit Radien von je 40 m. Die Teststrecke endet am Startpunkt.
Rundenzeiten und Fazit:
| Versuch | Rundenzeit [s] | Differenz [s] |
|---|---|---|
| ohne Regler | 140,41 | 0 |
| x-Regler | 140,36 | 0,05 |
| y-Regler | 139,77 | 0,64 |
| xy-Regler | 139,74 | 0,67 |
Die zurückgelegte Strecke des Fahrzeugs wird anhand seiner Position auf der Teststrecke im Vergleich zur Ausgangsposition bestimmt. Es zeigt sich, dass sich zwei Gruppen bilden, eine Gruppe mit dem Referenzfahrzeug und der x-Regelung und eine Gruppe mit der y- und xy-Regelung. Die Einschaltung des x-Reglers führt zu einer minimalen Verbesserung der Rundenzeit im Vergleich zur Referenzzeit. Erst durch die Regelung des Ballasts in der y-Ebene zeigt das Fahrzeug einen signifikanten Unterschied im Vergleich zum Referenzfahrzeug. Eine zusätzliche Regelung in der x-Ebene führt zu einer geringfügigen Verbesserung im Vergleich zum reinen y-Regler. Somit erreicht der xy-Regler die beste Rundenzeit. Die Differenz zwischen den Reglern nimmt erwartungsgemäß mit jeder gefahrenen Runde zu.
Die Simulationsergebnisse entsprechen den erwarteten physikalischen Überlegungen, was das entwickelte Modell für die Bewertung des Konzepts der dynamischen Gewichtsverlagerung geeignet macht. Die qualitativen Auswertungen der Untersuchungen zeigen einen Vorteil im Fahrzeugverhalten, wenn die Schwerpunktlage dynamisch während der Fahrt unter Berücksichtigung der Fahrsituationen verschoben wird.
Es ist zu betonen, dass die oben genannte Aussage lediglich eine qualitative Einschätzung darstellt. Quantitative Bewertungen, wie beispielsweise die genaue Größe der Verbesserung der Rundenzeit, müssen jedoch kritisch betrachtet werden. Dies liegt daran, dass die durchgeführten Simulationen auf einem nicht validierten Demomodell des Fahrzeugs in CarMaker basieren, dessen Genauigkeit der Fahrzeugparametrierung in dieser Arbeit nicht näher analysiert wurde. Ein wesentlicher Kritikpunkt liegt beispielsweise in der Tatsache, dass die Eigenschaften der Reifen im Modell nicht berücksichtigt wurden. Es ist bekannt, dass Reifen ein degressives Verhalten mit zunehmender Radlast aufweisen, während die im Demomodell verwendeten Reifen lineare Eigenschaften aufzeigen.
Trotz allem hat diese Analyse in Verbindung mit den verwendeten Tools viel Freude bereitet und eine tiefere Auseinandersetzung mit der Fahrdynamik ermöglicht.
Bis dahin alles gute!